Segregation of Robotic Swarms
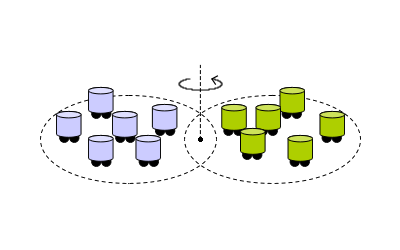
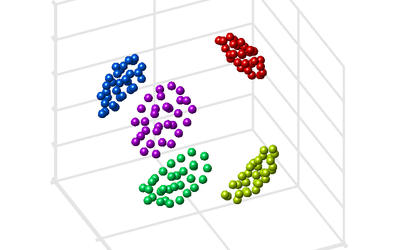
A simple and effective controller that segregates a heterogeneous swarm into homogeneous clusters.

A simple and effective controller that segregates a heterogeneous swarm into homogeneous clusters.
We compare two of our methods for swarm navigation: VGVOs and hierarchical abstractions.
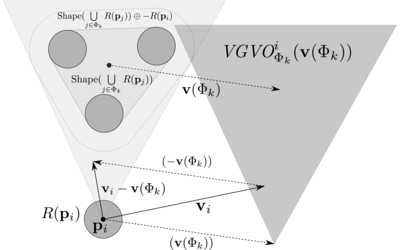
The VGVO is introduced in order to maintain segregation during navigation of a robotic swarm.
A hierarchical abstraction that follows simple traffic rules to avoid congestions during navigation.
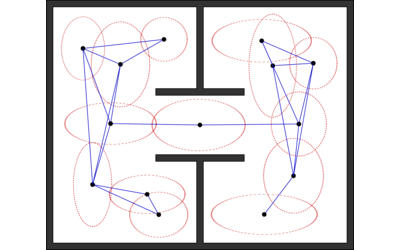
We use Probabilistic Roadmaps in order to plan a path for a 5 DoF abstraction of a robotic swarm.